mi | Technik/IT
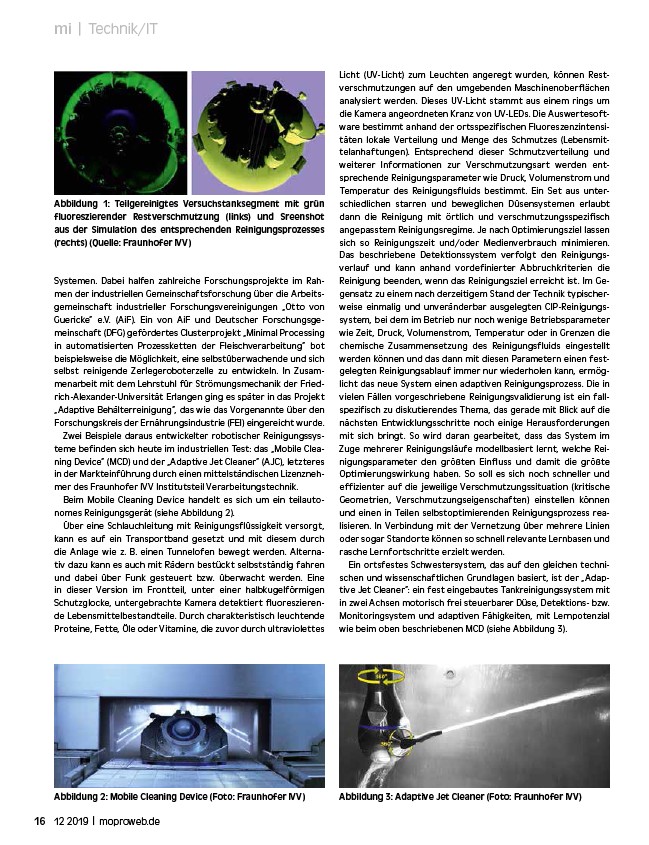
Abbildung 1: Teilgereinigtes Versuchstanksegment mit grün
fluoreszierender Restverschmutzung (links) und Sreenshot
aus der Simulation des entsprechenden Reinigungsprozesses
(rechts) (Quelle: Fraunhofer IVV)
Systemen. Dabei halfen zahlreiche Forschungsprojekte im Rahmen
der industriellen Gemeinschaftsforschung über die Arbeitsgemeinschaft
industrieller Forschungsvereinigungen „Otto von
Guericke“ e.V. (AiF). Ein von AiF und Deutscher Forschungsgemeinschaft
(DFG) gefördertes Clusterprojekt „Minimal Processing
in automatisierten Prozessketten der Fleischverarbeitung“ bot
beispielsweise die Möglichkeit, eine selbstüberwachende und sich
selbst reinigende Zerlegeroboterzelle zu entwickeln. In Zusammenarbeit
mit dem Lehrstuhl für Strömungsmechanik der Friedrich
Alexander-Universität Erlangen ging es später in das Projekt
„Adaptive Behälterreinigung“, das wie das Vorgenannte über den
Forschungskreis der Ernährungsindustrie (FEI) eingereicht wurde.
Zwei Beispiele daraus entwickelter robotischer Reinigungssysteme
befinden sich heute im industriellen Test: das „Mobile Cleaning
Device“ (MCD) und der „Adaptive Jet Cleaner“ (AJC), letzteres
in der Markteinführung durch einen mittelständischen Lizenznehmer
des Fraunhofer IVV Institutsteil Verarbeitungstechnik.
Beim Mobile Cleaning Device handelt es sich um ein teilautonomes
Reinigungsgerät (siehe Abbildung 2).
Über eine Schlauchleitung mit Reinigungsflüssigkeit versorgt,
kann es auf ein Transportband gesetzt und mit diesem durch
die Anlage wie z. B. einen Tunnelofen bewegt werden. Alternativ
dazu kann es auch mit Rädern bestückt selbstständig fahren
und dabei über Funk gesteuert bzw. überwacht werden. Eine
in dieser Version im Frontteil, unter einer halbkugelförmigen
Schutzglocke, untergebrachte Kamera detektiert fluoreszierende
Lebensmittelbestandteile. Durch charakteristisch leuchtende
Proteine, Fette, Öle oder Vitamine, die zuvor durch ultraviolettes
Abbildung 2: Mobile Cleaning Device (Foto: Fraunhofer IVV) Abbildung 3: Adaptive Jet Cleaner (Foto: Fraunhofer IVV)
16 12 2019 | moproweb.de
Licht (UV-Licht) zum Leuchten angeregt wurden, können Restverschmutzungen
auf den umgebenden Maschinenoberflächen
analysiert werden. Dieses UV-Licht stammt aus einem rings um
die Kamera angeordneten Kranz von UV-LEDs. Die Auswertesoftware
bestimmt anhand der ortsspezifischen Fluoreszenzintensitäten
lokale Verteilung und Menge des Schmutzes (Lebensmittelanhaftungen).
Entsprechend dieser Schmutzverteilung und
weiterer Informationen zur Verschmutzungsart werden entsprechende
Reinigungsparameter wie Druck, Volumenstrom und
Temperatur des Reinigungsfluids bestimmt. Ein Set aus unterschiedlichen
starren und beweglichen Düsensystemen erlaubt
dann die Reinigung mit örtlich und verschmutzungsspezifisch
angepasstem Reinigungsregime. Je nach Optimierungsziel lassen
sich so Reinigungszeit und/oder Medienverbrauch minimieren.
Das beschriebene Detektionssystem verfolgt den Reinigungsverlauf
und kann anhand vordefinierter Abbruchkriterien die
Reinigung beenden, wenn das Reinigungsziel erreicht ist. Im Gegensatz
zu einem nach derzeitigem Stand der Technik typischerweise
einmalig und unveränderbar ausgelegten CIP-Reinigungssystem,
bei dem im Betrieb nur noch wenige Betriebsparameter
wie Zeit, Druck, Volumenstrom, Temperatur oder in Grenzen die
chemische Zusammensetzung des Reinigungsfluids eingestellt
werden können und das dann mit diesen Parametern einen festgelegten
Reinigungsablauf immer nur wiederholen kann, ermöglicht
das neue System einen adaptiven Reinigungsprozess. Die in
vielen Fällen vorgeschriebene Reinigungsvalidierung ist ein fallspezifisch
zu diskutierendes Thema, das gerade mit Blick auf die
nächsten Entwicklungsschritte noch einige Herausforderungen
mit sich bringt. So wird daran gearbeitet, dass das System im
Zuge mehrerer Reinigungsläufe modellbasiert lernt, welche Reinigungsparameter
den größten Einfluss und damit die größte
Optimierungswirkung haben. So soll es sich noch schneller und
effizienter auf die jeweilige Verschmutzungssituation (kritische
Geometrien, Verschmutzungseigenschaften) einstellen können
und einen in Teilen selbstoptimierenden Reinigungsprozess realisieren.
In Verbindung mit der Vernetzung über mehrere Linien
oder sogar Standorte können so schnell relevante Lernbasen und
rasche Lernfortschritte erzielt werden.
Ein ortsfestes Schwestersystem, das auf den gleichen technischen
und wissenschaftlichen Grundlagen basiert, ist der „Adaptive
Jet Cleaner“: ein fest eingebautes Tankreinigungssystem mit
in zwei Achsen motorisch frei steuerbarer Düse, Detektions- bzw.
Monitoringsystem und adaptiven Fähigkeiten, mit Lernpotenzial
wie beim oben beschriebenen MCD (siehe Abbildung 3).