mi | Technik/IT
gungszeit, den Wasserbedarf
und den Bedarf an Pumpenergie
für die Reinigung mit Hilfe eines
selbstlernenden Verfahrens optimiert.
Die bisherigen Methoden
zur Steuerung für die Reinigung
wird durch Q-Learning
18 11 2019 | moproweb.de
eine deutliche Verbesserung
der Prozessparameter und der
Adaptionsfähigkeit des Verfahrens
bringen. Durch Evaluation
der Umgebung in ihrem aktuellem
Zustand und im Vergleich zu
ihrem vorherigen Zustand, bevor
der Regler eingegriffen hat,
zieht der Agent seine Schlüsse
zur Bewertung. Es wird bewertet,
ob der Eingriff eine positive,
also zielführende Veränderung
bewirkt hat oder nicht. Eine
positive Änderung wird belohnt,
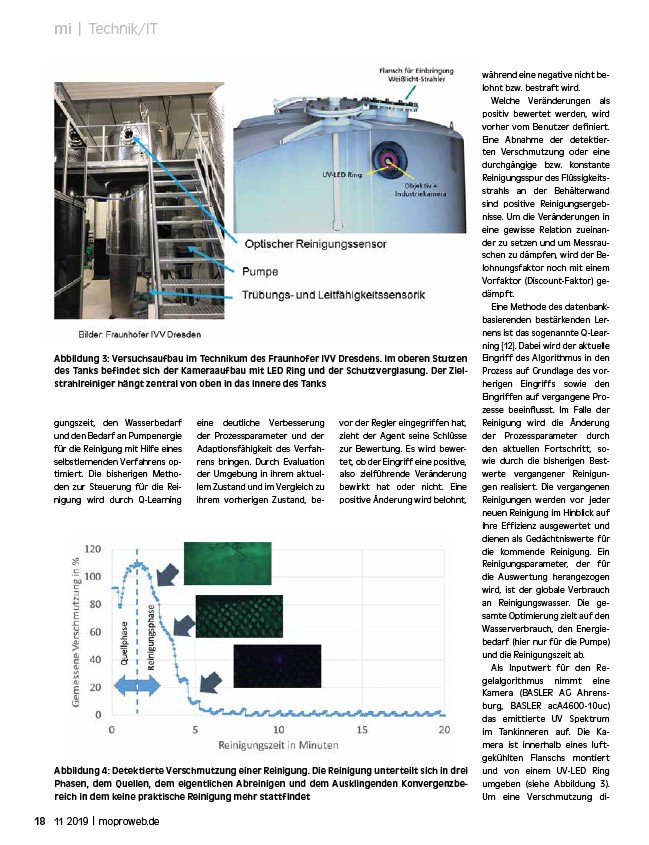
Abbildung 4: Detektierte Verschmutzung einer Reinigung. Die Reinigung unterteilt sich in drei
Phasen, dem Quellen, dem eigentlichen Abreinigen und dem Ausklingenden Konvergenzbereich
in dem keine praktische Reinigung mehr stattfindet
während eine negative nicht belohnt
bzw. bestraft wird.
Welche Veränderungen als
positiv bewertet werden, wird
vorher vom Benutzer definiert.
Eine Abnahme der detektierten
Verschmutzung oder eine
durchgängige bzw. konstante
Reinigungsspur des Flüssigkeitsstrahls
an der Behälterwand
sind positive Reinigungsergebnisse.
Um die Veränderungen in
eine gewisse Relation zueinander
zu setzen und um Messrauschen
zu dämpfen, wird der Belohnungsfaktor
noch mit einem
Vorfaktor (Discount-Faktor) gedämpft.
Eine Methode des datenbankbasierenden
bestärkenden Lernens
ist das sogenannte Q-Learning
12. Dabei wird der aktuelle
Eingriff des Algorithmus in den
Prozess auf Grundlage des vorherigen
Eingriffs sowie den
Eingriffen auf vergangene Prozesse
beeinflusst. Im Falle der
Reinigung wird die Änderung
der Prozessparameter durch
den aktuellen Fortschritt, sowie
durch die bisherigen Bestwerte
vergangener Reinigungen
realisiert. Die vergangenen
Reinigungen werden vor jeder
neuen Reinigung im Hinblick auf
ihre Effizienz ausgewertet und
dienen als Gedächtniswerte für
die kommende Reinigung. Ein
Reinigungsparameter, der für
die Auswertung herangezogen
wird, ist der globale Verbrauch
an Reinigungswasser. Die gesamte
Optimierung zielt auf den
Wasserverbrauch, den Energiebedarf
(hier nur für die Pumpe)
und die Reinigungszeit ab.
Als Inputwert für den Regelalgorithmus
nimmt eine
Kamera (BASLER AG Ahrensburg,
BASLER acA4600-10uc)
das emittierte UV Spektrum
im Tankinneren auf. Die Kamera
ist innerhalb eines luftgekühlten
Flanschs montiert
und von einem UV-LED Ring
umgeben (siehe Abbildung 3).
Um eine Verschmutzung di-
Abbildung 3: Versuchsaufbau im Technikum des Fraunhofer IVV Dresdens. Im oberen Stutzen
des Tanks befindet sich der Kameraaufbau mit LED Ring und der Schutzverglasung. Der Zielstrahlreiniger
hängt zentral von oben in das Innere des Tanks